|
|
|
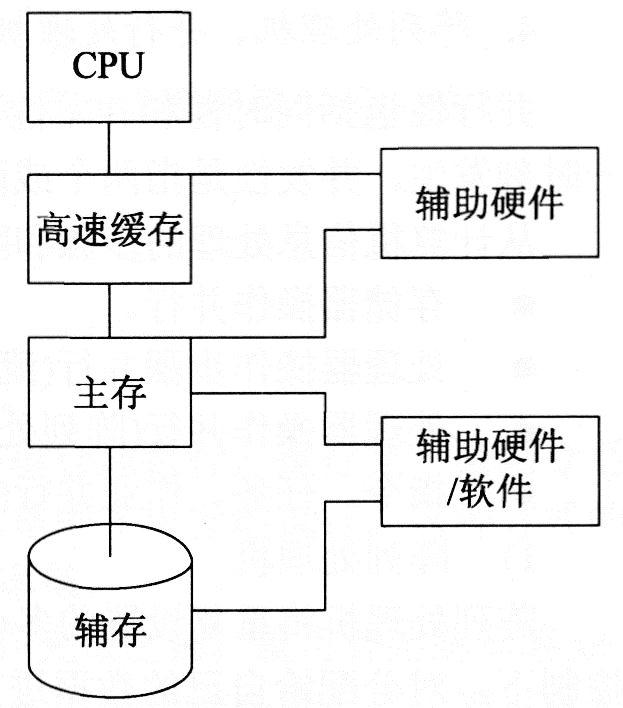
计算机系统中包括各种存储器,如CPU内部的通用寄存器组和Cache(高速缓存)、CPU外部的Cache、主板上的主存储器、主板外的联机(在线)磁盘存储器以及脱机(离线)的磁带存储器和光盘存储器等。不同特点的存储器通过适当的硬件、软件有机地组合在一起形成计算机的存储体系层次结构,位于更高层的存储设备比较低层次的存储设备速度更快、单位比特造价也更高。其中,Cache和主存之间的交互功能全部由硬件实现,而主存与辅存之间的交互功能可由硬件和软件结合起来实现。
|
|
|
|
|
|
|
|
|
|
(1)内存。也称为主存(Main Memory),设在主机内或主机板上,用来存放机器当前运行所需要的程序和数据,以便向CPU提供信息。相对于外存,其特点是容量小、速度快。
|
|
|
|
(2)外存。也称为辅存,如磁盘、磁带和光盘等,用来存放当前不参加运行的大量信息,而在需要时调入内存。
|
|
|
|
|
|
按构成存储器的材料可分为磁存储器、半导体存储器和光存储器。
|
|
|
|
(1)磁存储器。磁存储器是用磁性介质做成的,如磁芯、磁泡、磁膜、磁鼓、磁带及磁盘等。
|
|
|
|
(2)半导体存储器。根据所用元器件又可分为双极型和MOS型;根据数据是否需要刷新又可分为静态(Static memory)和动态(Dynamic memory)两类。
|
|
|
|
(3)光存储器。利用光学方法读/写数据的存储器,如光盘(Optical Disk)。
|
|
|
|
|
|
按存储器的工作方式可分为读/写存储器和只读存储器。
|
|
|
|
(1)读/写存储器(Random Access Memory,RAM)。它指既能读取数据也能存入数据的存储器。按照存储单元的工作原理,随机存储器又分为静态随机存储器(Static RAM,SRAM)和动态随机存储器(Dynamic RAM,DRAM)。SRAM比DRAM更快,也贵得多。
|
|
|
|
(2)只读存储器。工作过程中仅能读取的存储器,根据数据的写入方式,这种存储器又可细分为ROM、PROM、EPROM和EEPROM等类型。
|
|
|
|
①固定只读存储器(Read Only Memory,ROM)。这种存储器是在厂家生产时就写好数据的,其内容只能读出,不能改变。一般用于存放系统程序BIOS和用于微程序控制。
|
|
|
|
②可编程的只读存储器(Programmable Read Only Memory,PROM)。其中的内容可以由用户一次性地写入,写入后不能再修改。
|
|
|
|
③可擦除可编程的只读存储器(Erasable Programmable Read Only Memory,EPROM)。其中的内容既可以读出,也可以由用户写入,写入后还可以修改。改写的方法是写入之前先用紫外线照射15~20分钟以擦去所有信息,然后再用特殊的电子设备写入信息。
|
|
|
|
④电擦除可编程的只读存储器(Electrically Erasable Programmable Read Only Memory,EEPROM)。与EPROM相似,EEPROM中的内容既可以读出,也可以进行改写。只不过这种存储器是用电擦除的方法进行数据的改写。
|
|
|
|
⑤闪存(Flash Memory)。闪存是一种非易失性存储器,基于EEPROM,已成为重要的存储技术,为大量电子设备包括数码相机、手机、PDA、笔记本、台式机和服务器等计算机系统提供快速且持久的存储能力。
|
|
|
|
存储在ROM设备中的程序通常称为固件(Firmware)。例如,当计算机加电后,它会运行存储在ROM中的固件。
|
|
|
|
|
|
按访问方式可分为按地址访问的存储器和按内容访问的存储器。
|
|
|
|
|
|
按寻址方式可分为随机存储器、顺序存储器和直接存储器。
|
|
|
|
(1)随机存储器(Random Access Memory,RAM)。这种存储器可对任何存储单元存入或读取数据,访问任何一个存储单元所需的时间是相同的。
|
|
|
|
(2)顺序存储器(Sequentially Addressed Memory,SAM)。访问数据所需要的时间与数据所在的存储位置相关,磁带是典型的顺序存储器。
|
|
|
|
(3)直接存储器(Direct Addressed Memory,DAM)。介于随机存取和顺序存取之间的一种寻址方式。磁盘是一种直接存取存储器,它对磁道的寻址是随机的,而在一个磁道内则是顺序寻址。
|
|
|
|
|
|
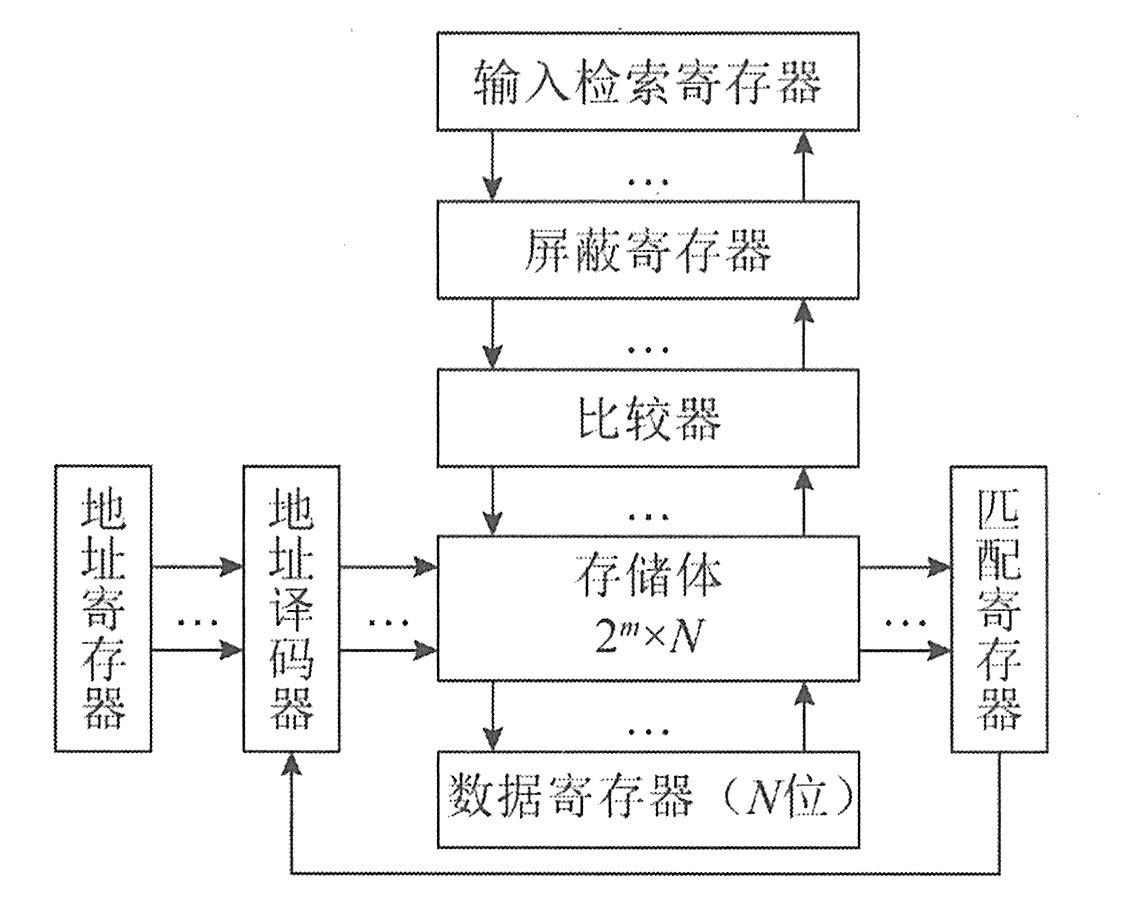
相联存储器是一种按内容访问的存储器。其工作原理就是把数据或数据的某一部分作为关键字,按顺序写入信息,读出时并行地将该关键字与存储器中的每一单元进行比较,找出存储器中所有与关键字相同的数据字,特别适合于信息的检索和更新。
|
|
|
|
|
|
|
|
|
|
相联存储器中,输入检索寄存器用来存放要检索的内容(关键字),屏蔽寄存器用来屏蔽那些不参与检索的字段,比较器将检索的关键字与存储体的每一单元进行比较。为了提高速度,比较器的数量应很大。对于位比较器,应每位对应一个,应有2m×N个,对于字比较器应有2m个。匹配寄存器用来记录比较的结果,它应有2m个二进制位,用来记录2m个比较器的结果,1为相等(匹配),0为不相等(不匹配)。
|
|
|
|
相联存储器可用在高速缓冲存储器中,在虚拟存储器中用来作为段表、页表或快表存储器,用在数据库和知识库中。
|
|
|
|
|
|
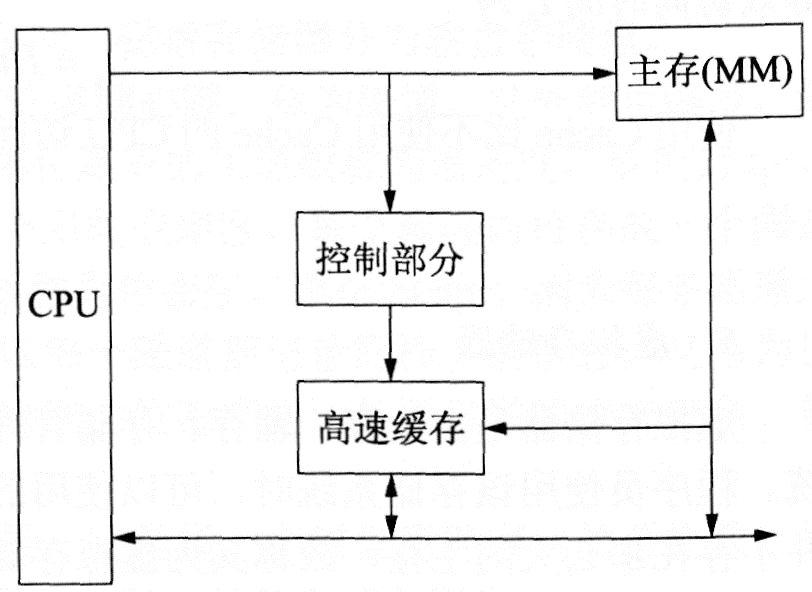
高速缓存(Cache)由快速半导体存储器构成,用来存放当前最活跃的程序和数据,其内容是主存局部域的副本,对程序员来说是透明的。
|
|
|
|
|
|
Cache存储器中控制部分的功能是判断CPU要访问的信息是否在Cache存储器中,若在即为命中,若不在则没有命中。命中时直接对Cache存储器寻址;未命中时,要按照替换原则决定主存的一块信息放到Cache存储器的哪一块里。
|
|
|
|
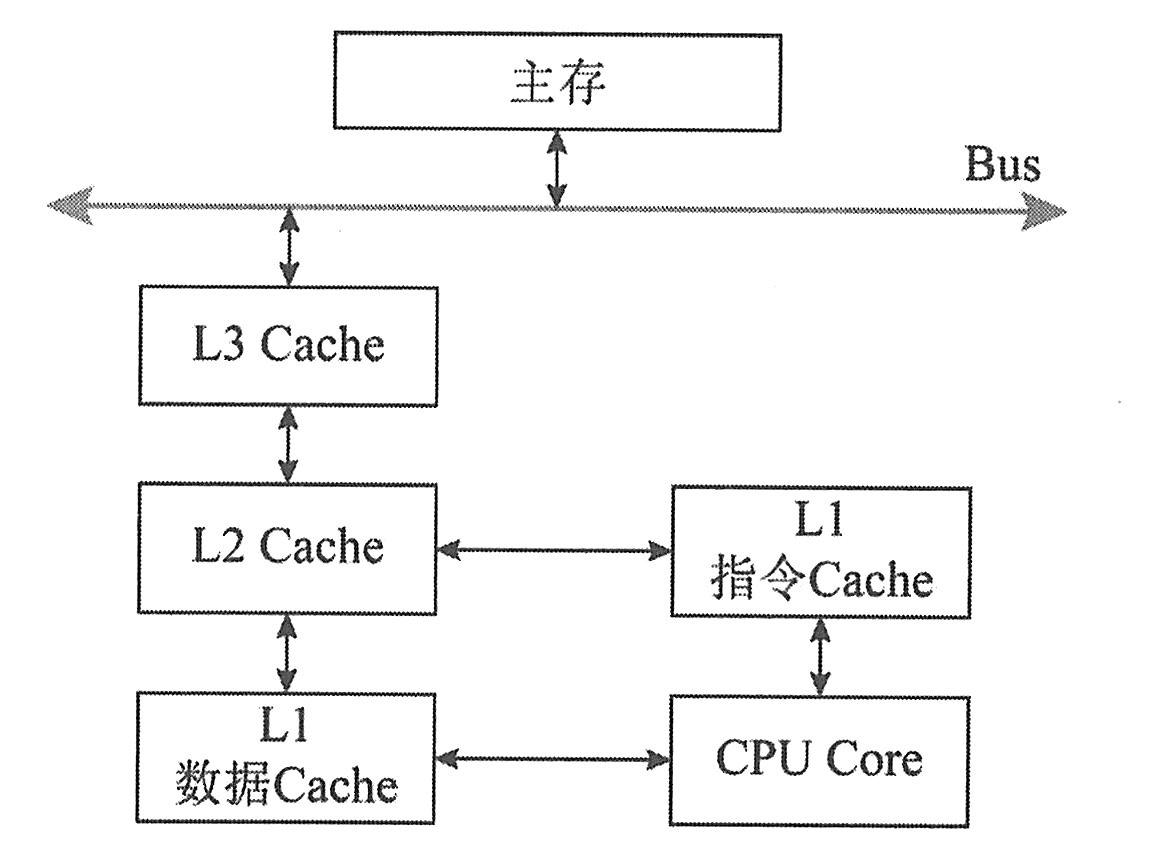
现代CPU中Cache分为了多个层级,如下图所示。
|
|
|
|
|
|
|
|
在多级Cache的计算机中,Cache分为一级(L1 Cache)、二级(L2Cache)、三级(L3 Cache)等,CPU访存时首先查找L1 Cache,如果不命中,则访问L2Cache,直到所有级别的Cache都不命中,才访问主存。通常要求L1 Cache的速度足够快,以赶上CPU的主频。如果Cache为两级,则L1 Cache的容量一般都比较小,为几千字节到几十千字节;L2 Cache则具有较高的容量,一般为几百字节到几兆字节,以使高速缓存具有足够高的命中率。
|
|
|
|
|
|
在CPU工作时,送出的是主存单元的地址,而应从Cache存储器中读/写信息。这就需要将主存地址转换成Cache存储器的地址,这种地址的转换称为地址映像。Cache的地址映像有如下3种方法。
|
|
|
|
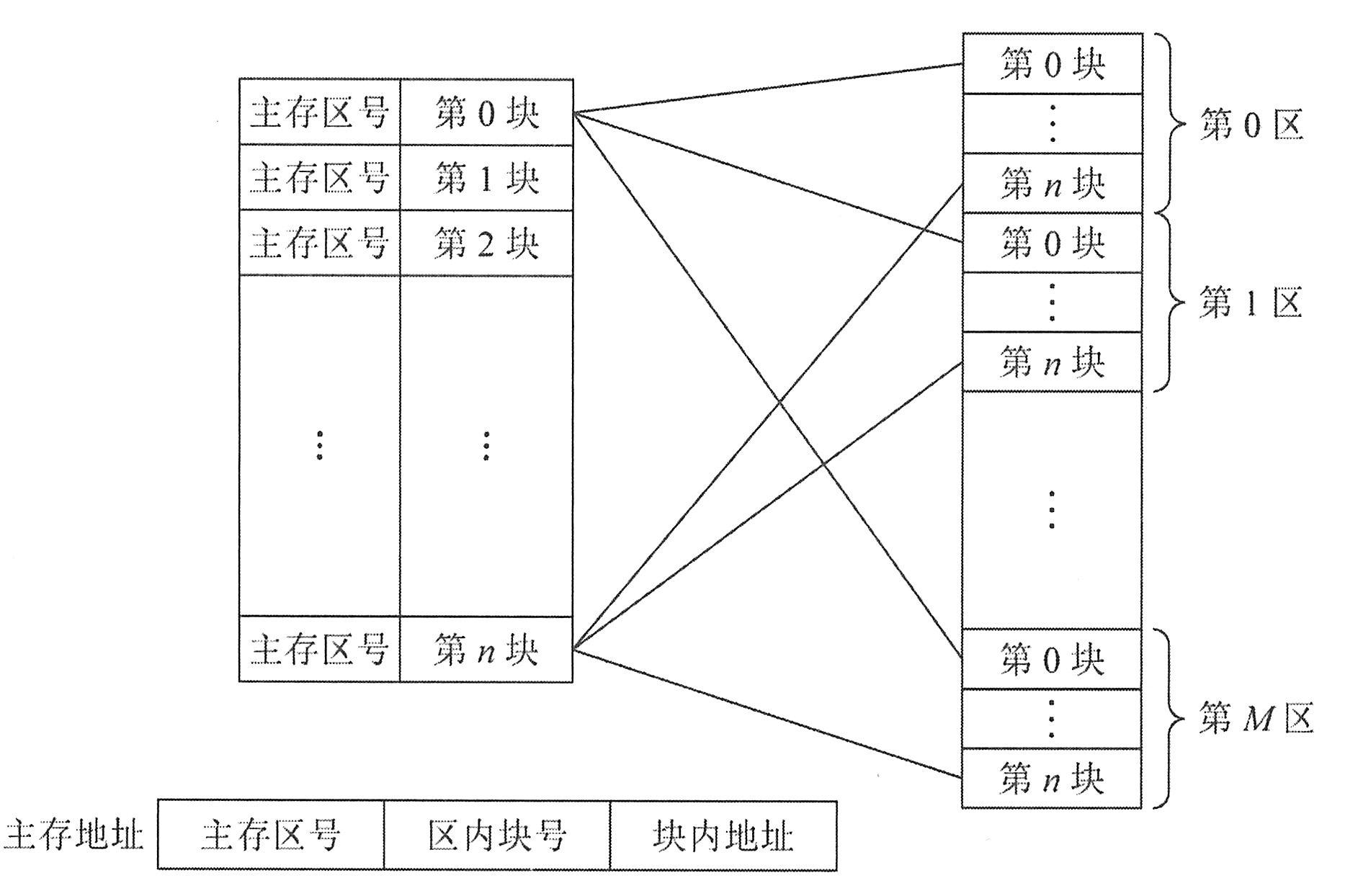
(1)直接映像。直接映像是指主存的块与Cache块的对应关系是固定的,如下图所示。
|
|
|
|
|
|
|
|
在这种映像方式下,由于主存中的块只能存放在Cache存储器的相同块号中,因此,只要主存地址中的主存区号与Cache中记录的主存区号相同,则表明访问Cache命中。一旦命中,由主存地址中的区内块号立即可得到要访问的Cache存储器中的块,而块内地址就是主存地址中给出的低位地址。
|
|
|
|
直接映像方式的优点是地址变换很简单,缺点是灵活性差。例如,不同区号中块号相同的块无法同时调入Cache存储器,即使Cache存储器中有空闲的块也不能利用。
|
|
|
|
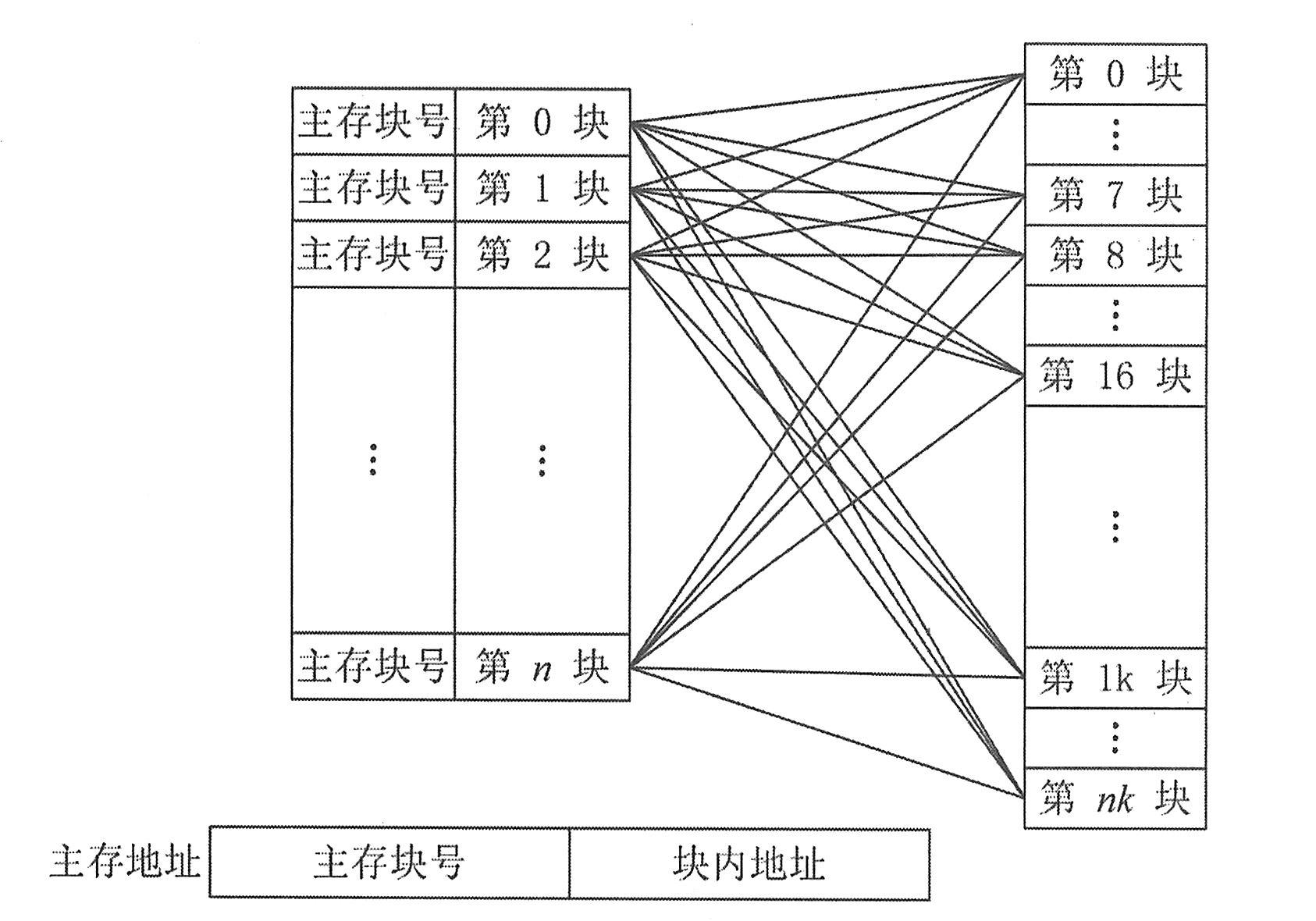
(2)全相联映像。全相联映像如下图所示。同样,主存与Cache存储器均分成大小相同的块。这种映像方式允许主存的任一块可以调入Cache存储器的任何一个块的空间中。
|
|
|
|
|
|
|
|
例如,主存为64MB,Cache为32KB,块的大小为4KB(块内地址需要12位),因此主存分为16384块,块号从0~16383,表示块号需要14位,Cache分为8块,块号为0~7,表示块号需3位。存放主存块号的相联存储器需要有Cache块个数相同数目的单元(该例中为8),相联存储器中每个单元记录所存储的主存块的块号,该例中相联存储器每个单元应为14位,共8个单元。
|
|
|
|
在地址变换时,利用主存地址高位表示的主存块号与Cache中相联存储器所有单元中记录的主存块号进行比较,若相同即为命中。这时相联存储器单元的编号就对应要访问Cache的块号,从而在相应的Cache块中根据块内地址(上例中块内地址是12位,Cache与主存的块内地址是相同的)访问到相应的存储单元。
|
|
|
|
全相联映像的主要优点是主存的块调入Cache的位置不受限制,十分灵活。其主要缺点是无法从主存块号中直接获得Cache的块号,变换比较复杂,速度比较慢。
|
|
|
|
(3)组相联映像。这种方式是前面两种方式的折中。具体方法是将Cache中的块再分成组。例如,假定Cache有16块,再将每两块分为1组,则Cache就分为8组。主存同样分区,每区16块,再将每两块分为1组,则每区就分为8组。
|
|
|
|
组相联映像就是规定组采用直接映像方式而块采用全相联映像方式。也就是说,主存任何区的0组只能存到Cache的0组中,1组只能存到Cache的1组中,以此类推。组内的块则采用全相联映像方式,即一组内的块可以任意存放。也就是说,主存一组中的任一块可以存入Cache相应组的任一块中。
|
|
|
|
在这种方式下,通过直接映像方式来决定组号,在一组内再用全相联映像方式来决定Cache中的块号。由主存地址高位决定的主存区号与Cache中区号比较可决定是否命中。主存后面的地址即为组号。
|
|
|
|
|
|
替换算法的目标就是使Cache获得尽可能高的命中率。常用算法有如下几种。
|
|
|
|
(1)随机替换算法。就是用随机数发生器产生一个要替换的块号,将该块替换出去。
|
|
|
|
(2)先进先出算法。就是将最先进入Cache的信息块替换出去。
|
|
|
|
(3)近期最少使用算法。这种方法是将近期最少使用的Cache中的信息块替换出去。
|
|
|
|
(4)优化替换算法。这种方法必须先执行一次程序,统计Cache的替换情况。有了这样的先验信息,在第二次执行该程序时便可以用最有效的方式来替换。
|
|
|
|
|
|
Cache的性能是计算机系统性能的重要方面。命中率是Cache的一个重要指标,但不是最主要的指标。Cache设计的目标是在成本允许的条件下达到较高的命中率,使存储系统具有最短的平均访问时间。设Hc为Cache的命中率,tc为Cache的存取时间,tm为主存的访问时间,则Cache存储器的等效加权平均访问时间ta为:
|
|
|
|
ta=Hctc+(1-Hc)tm=tc+(1-Hc)(tm-tc)
|
|
|
|
这里假设Cache访问和主存访问是同时启动的,其中,tc为Cache命中时的访问时间,(tm-tc)为失效访问时间。如果在Cache不命中时才启动主存,则
|
|
|
|
|
|
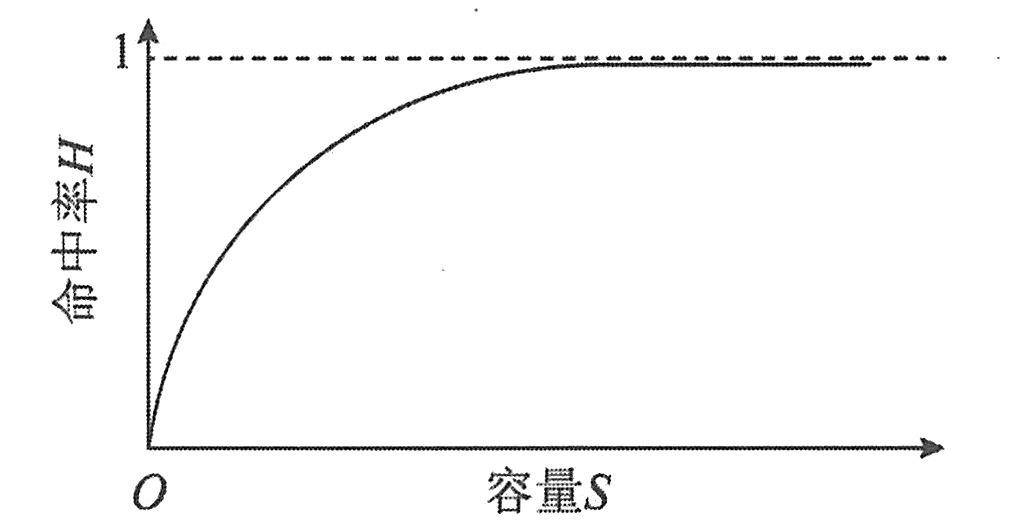
Cache的命中率与Cache容量的关系如下图所示。Cache容量越大,则命中率越高,随着Cache容量的增加,其失效率接近0%(命中率逐渐接近100%)。但是,增加Cache容量意味着增加Cache的成本和增加Cache的命中时间。
|
|
|
|
|
|
|
|
在指令流水线中,Cache访问作为流水线中的一个操作阶段,Cache失效将影响指令的流水。因此,降低Cache的失效率是提高Cache性能的一项重要措施。当Cache容量比较小时,容量因素在Cache失效中占有比较大的比例。降低Cache失效率的方法主要有选择恰当的块容量、提高Cache的容量和提高Cache的相联度等。
|
|
|
|
|
|
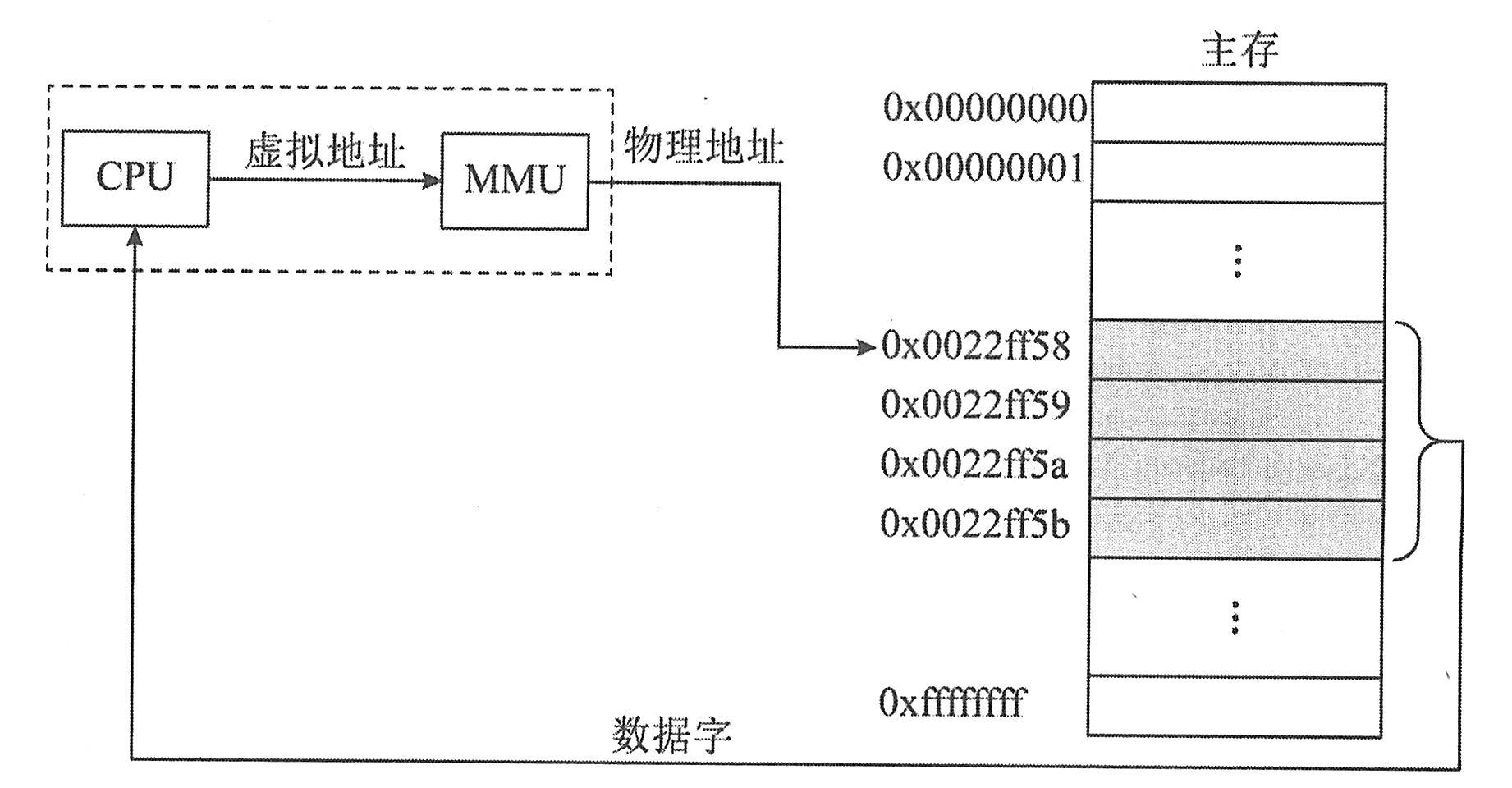
在概念上,可以将主存存储器看作一个由若干个字节构成的存储空间,每个字节(称为一个存储单元)有一个地址编号,主存单元的该地址称为物理地址(physical address)。当需要访问主存中的数据时,由CPU给出要访问数据所在的存储单元地址,然后由主存的读写控制部件定位对应的存储单元,对其进行读(或写)操作来完成访问操作。
|
|
|
|
现代系统提供了一种对主存的抽象,称为虚拟存储(virtual memory),使用虚拟地址(virtual address,由CPU生成)的概念来访问主存,使用专门的MMU(Memory Management Unit)将虚拟地址转换为物理地址后访问主存。设主存容量为4GB,则其简化后的访问操作和内存模型如下图所示。
|
|
|
|
|
|
|
|
虚拟存储器实际上是一种逻辑存储器,实质是对物理存储设备进行逻辑化的处理,并将统一的逻辑视图呈现给用户。因此,用户在使用时,操作的是虚拟设备,无需关心底层的物理环境,从而可以充分利用基于异构平台的存储空间,达到最优化的使用效率。
|
|
|
|
|
|
外存储器用来存放暂时不用的程序和数据,并且以文件的形式存储。CPU不能直接访问外存中的程序和数据,只有将其以文件为单位调入主存才可访问。外存储器主要由磁表面存储器(如磁盘、磁带)、光盘存储器及固态硬盘(采用Flash芯片或DRAM作为存储介质的存储器)构成。
|
|
|
|
|
|
硬盘是最常见的外存储器。一个硬盘驱动器内可装有多个盘片,组成盘片组,每个盘片都配有一个独立的读/写头。
|
|
|
|
为了正确地存储信息,将盘片划成许多同心圆,称为磁道(track)。将一个磁道沿圆周划分为若干段,每段称为一个扇区(sector),每个扇区内可存放一个固定长度的数据块,如512字节。一组盘片的所有记录面上相同序号的磁道构成一个柱面(cylinder)。
|
|
|
|
硬盘的寻址信息由硬盘驱动号、柱面号、磁头号(记录面号)、数据块号(或扇区号)以及交换量组成。
|
|
|
|
磁盘以扇区大小的块来读写数据。对扇区的访问时间(access time)主要包括以下三个部分:寻道时间(seek time)、旋转时间(rotational latency)和传送时间(transfer time)。
|
|
|
|
(1)寻道时间。为了读取某个目标扇区的内容,需要将读/写头移动到包含目标扇区的磁道上,这称为寻道时间Tseek。显然,寻道时间与读/写头的移动速度以及其之前的位置有关。通过数千次对随机扇区的寻道操作求平均值来测得平均寻道时间,一般为3~9ms。
|
|
|
|
(2)旋转时间。一旦读/写头定位至期望的磁道,就等待目标扇区旋转到读/写头的下方,该时间依赖于读/写头到达目标扇区前盘面的位置和旋转速度。在最坏情况下,读/写头刚好错过目标扇区,就必须等待磁盘旋转一周。因此,最大旋转延迟时间Tmax rotaion为磁盘旋转速度的倒数,平均旋转时间Tavg rotaion为最大旋转延迟时间的一半。
|
|
|
|
(3)传送时间。当目标扇区的第一个位位于读/写头下方时,就可以开始读或写该扇区的内容了。一个扇区数据的传送时间依赖与旋转速度和每磁道的扇区数目,因此可以粗略估算一个扇区的平均传送时间Tavg transfer为磁盘旋转速度的倒数乘以每磁道扇区数的倒数。
|
|
|
|
现代磁盘构造复杂,大容量磁盘采用多区记录技术,将柱面的集合分割成不相交的子集,每个子集称为一个记录区。每个记录区包含一组连续的柱面,一个及记录区中每个柱面的每条磁道有相同数量的扇区,扇区数由最靠近盘片中心的磁道所能包含的扇区数决定。
|
|
|
|
一个磁盘上可以记录的最大位数称为其最大容量。最大容量由记录密度、磁道密度和面密度决定。
|
|
|
|
记录密度是指每英寸磁道的段中可以存储的位数。磁道密度是盘片半径方向上每英寸的磁道数。面密度则是记录密度与磁道密度的乘积。
|
|
|
|
磁盘最大容量等于每扇区字节数×每磁道平均扇区数×每盘面磁道数×每盘片记录面数×盘片数。
|
|
|
|
磁盘通常以千兆字节(GB)或兆兆字节(TB)为单位来表示磁盘容量,且1GB=109B,1TB=1012B。
|
|
|
|
磁盘控制器必须对磁盘进行格式化后才能存储数据。格式化后的容量通常小于最大容量。
|
|
|
|
|
|
根据性能和用途,光盘存储器可分为只读型光盘(CD-ROM)、只写一次型光盘(WORM)和可擦除型光盘。只读型光盘是由生产厂家预先用激光在盘片上蚀刻不能再改写的各种信息,目前这类光盘的使用很普遍。只写一次型光盘是指由用户一次写入、可多次读出但不能擦除的光盘,写入方法是利用聚焦激光束的热能,使光盘表面发生永久性变化而实现的。可擦除型光盘是读/写型光盘,它是利用激光照射引起介质的可逆性物理变化来记录信息。
|
|
|
|
光盘存储器由光学、电学和机械部件等组成。其特点是记录密度高、存储容量大、采用非接触式读/写信息(光头距离光盘通常为2mm)、信息可长期保存(其寿命达10年以上)、采用多通道记录时数据传送率可超过200Mb/s、制造成本低、对机械结构的精度要求不高、存取时间较长。
|
|
|
|
|
|
固态硬盘(Solid State Disk,SSD)的存储介质分为两种,一种是采用闪存(FLASH芯片)作为存储介质;另一种是采用DRAM作为存储介质。
|
|
|
|
基于闪存的固态硬盘是固态硬盘的主要类别,其主体是一块PCB板,板上最基本的配件就是控制芯片、缓存芯片和用于存储数据的闪存芯片。主控芯片是固态硬盘的大脑,其作用有两个:一是合理调配数据在各个闪存芯片上的负荷;二是承担数据中转的作用,连接闪存芯片和外部SATA或USB接口。不同主控芯片差异很大,在数据处理能力、算法,对闪存芯片的读写控制方面会有非常大的不同,直接会导致固态硬盘产品在性能上差距很大。
|
|
|
|
一个闪存由多个块、每块由多页组成,通常页的大小为512B~4KB,块的大小为32~128页。在闪存中,数据是以页为单位读写的。只有在一个页所在的块被整体擦除后,才能写入该页。写一个块重复写入限定次数(例如100000)后,该块就会磨损坏而不能再使用。如果一个固态硬盘的主控芯片中磨损逻辑处理得好,就可以用很多年。
|
|
|
|
SSD的读操作比写操作要快,顺序读写操作比随机读写操作要快。进行随机写操作时,要擦除整块,因此需要较长的时间。另外,如果写操作试图修改一个包含其他有用数据的块,则需要将有用数据复制到一个新擦除的块中,然后才能进行写入操作。
|
|
|
|
固态硬盘的接口规范和定义、功能及使用方法上与普通硬盘基本相同,外形和尺寸也基本与普通的2.5英寸硬盘一致。
|
|
|
|
固态硬盘虽然价格仍较为昂贵,容量较低,但是由于具有传统机械硬盘不具备的快速读写、质量轻、能耗低以及体积小等特点,因此常作为传统机械式硬盘的替代品使用。
|
|
|
|
|
|
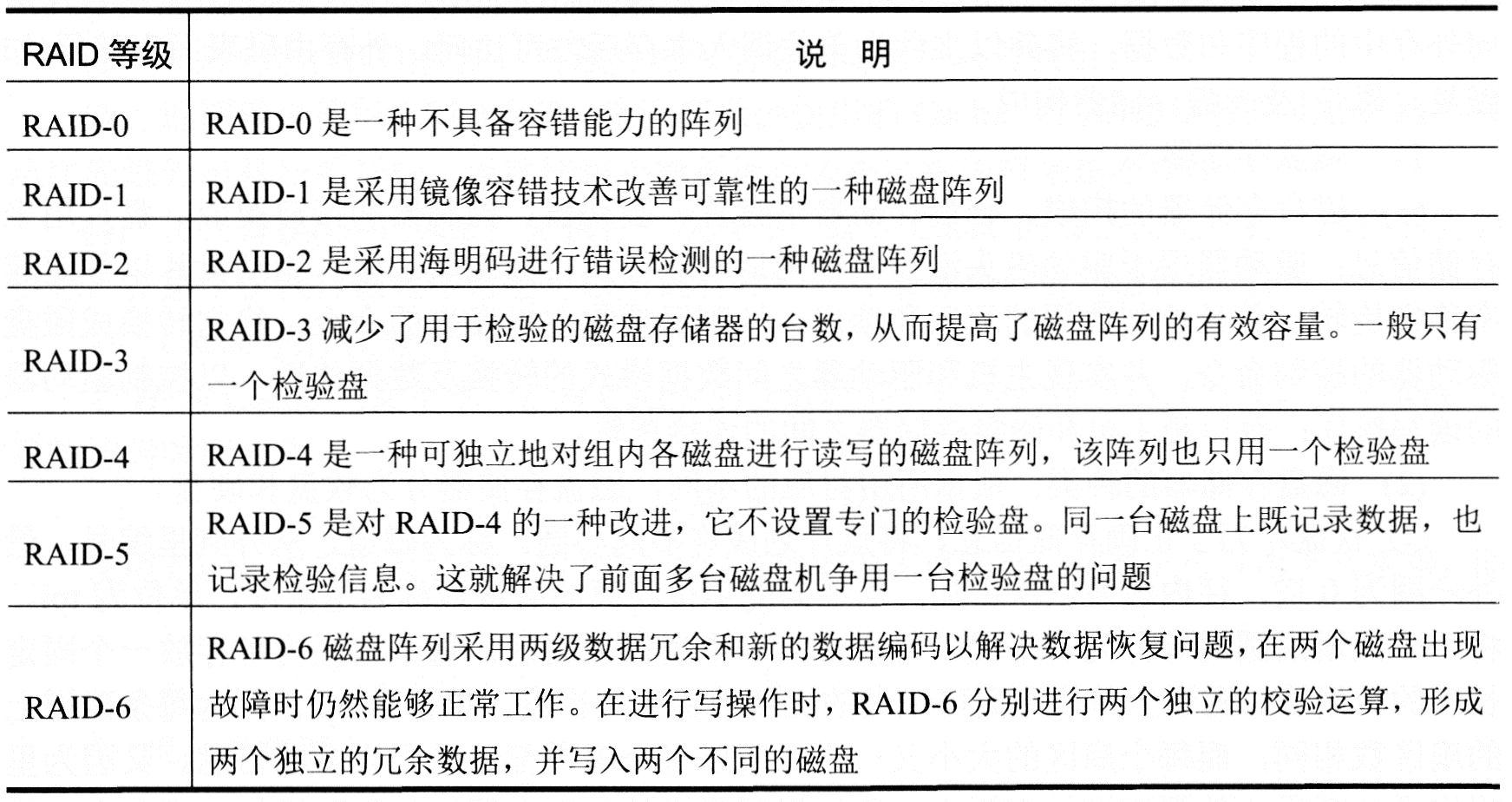
磁盘阵列是由多台磁盘存储器组成的一个快速、大容量、高可靠的外存子系统。现在常见的磁盘阵列称为廉价冗余磁盘阵列(Redundant Array of Independent Disk,RAID)。
|
|
|
|
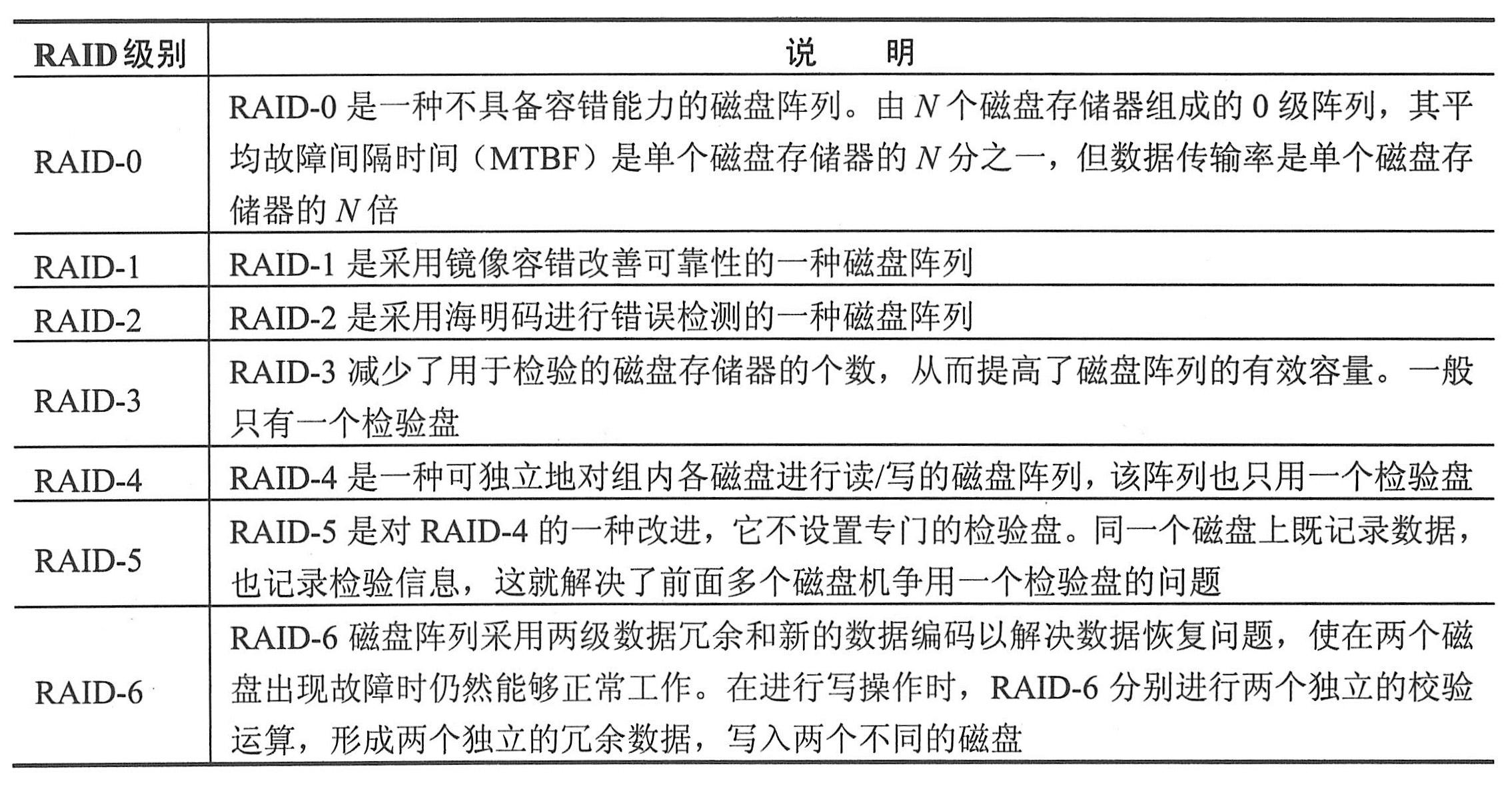
虽然RAID包含多块硬盘,但从用户视角看则是一个独立的大型存储设备。RAID可以充分发挥出多块硬盘的优势,实现远超出任何一块单独硬盘的速度和吞吐量。除了性能上的提高之外,RAID还可以提供良好的容错能力。RAID技术分为几种不同的等级,分别可以提供不同的速度、安全性和性价比。
|
|
|
|
|
|
|
|
|
|
除此之外,上述各种类型的RAID还可以组合起来,构成复合型的RAID,此处不再赘述。
|
|
|
|
|
|
存储域网络是连接服务器与存储设备的网络,它能够将多个分布在不同地点的RAID组织成一个逻辑存储设备,供多个服务器共享访问,如下图所示。通过网络将一个或多个服务器与多个存储设备连接起来,每个存储设备可以是RAID、磁带备份系统、磁带库和CD-ROM库等,构成了存储域网络(Storage Area Network,SAN)。这样的网络不仅解决服务器对存储容量的要求,还可以使多个服务器之间可以共享文件系统和辅助存储空间,避免数据和程序代码的重复存储,提高存储器的利用率。另外,SAN还实现了分布式存储系统的集中管理,降低了大容量存储系统的管理成本,提高了管理效率。
|
|
|
|
|
|
|