|
|
|
|
|
计算机系统的硬件故障通常是由元器件的失效引起的。对元器件进行寿命试验并根据实际资料统计得知,元器件的可靠性可分成3个阶段,在开始阶段,元器件的工作处于不稳定期,失效率较高;在第二阶段,元器件进入正常工作期,失效率最低,基本保持常数;在第三阶段,元器件开始老化,失效率又重新提高,这就是所谓的“浴盆曲线”。因此,应保证在计算机中使用的元器件处于第二阶段。在第一阶段应对元器件进行老化筛选,而到了第3个阶段,则淘汰该计算机。
|
|
|
|
计算机系统的可靠性是指从它开始运行(t=0)到某时刻t这段时间内能正常运行的概率,用R(t)表示。所谓失效率,是指单位时间内失效的元器件数与元器件总数的比例,用λ表示,当λ为常数时,可靠性与失效率的关系为
|
|
|
|
|
|
|
|
|
|
|
|
两次故障之间系统能正常工作的时间的平均值称为平均无故障时间(MTBF),即
|
|
|
|
|
|
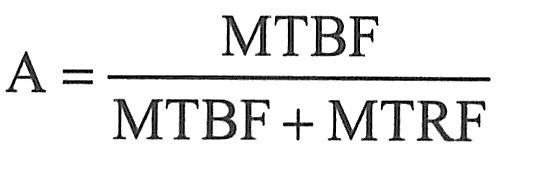
通常用平均修复时间(MTRF)来表示计算机的可维修性,即计算机的维修效率,指从故障发生到机器修复平均所需要的时间。计算机的可用性是指计算机的使用效率,它以系统在执行任务的任意时刻能正常工作的概率A来表示,即
|
|
|
|
|
|
计算机的RAS是指用可靠性R、可用性A和可维修性S这3个指标衡量一个计算机系统。但在实际应用中,引起计算机故障的原因除了元器件以外还有组装工艺、逻辑设计等因素。因此,不同厂家生产的兼容机即使采用相同的元器件,其可靠性及MTBF也可能相差很大。
|
|
|
|
|
|
计算机系统是一个复杂的系统,而且影响其可靠性的因素非常复杂,很难直接对其进行可靠性分析。但通过建立适当的数学模型,把大系统分割成若干子系统,可以简化其分析过程。常见的系统可靠性数学模型有以下3种。
|
|
|
|
(1)串联系统。假设一个系统由N个子系统组成,当且仅当所有的子系统都能正常工作时系统才能正常工作,这种系统称为串联系统,如下图所示。
|
|
|
|
|
|
|
|
设系统中各个子系统的可靠性分别用R1,R2,…,RN来表示,则系统的可靠性R可由下式求得。
|
|
|
|
|
|
如果系统的各个子系统的失效率分别用λ1,λ2,…,λN来表示,则系统的失效率λ可由下式求得。
|
|
|
|
|
|
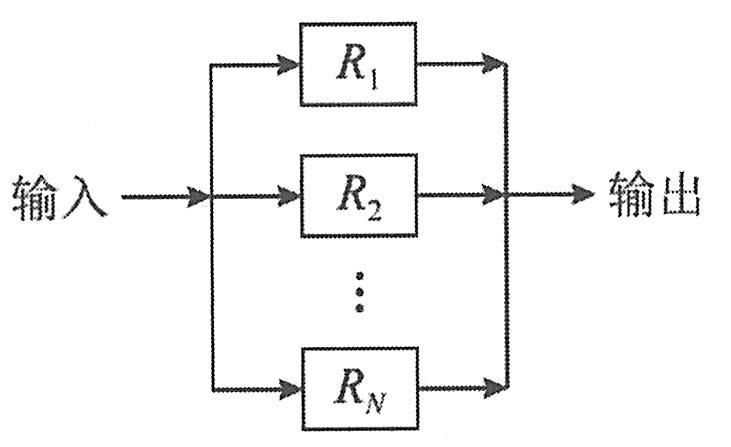
(2)并联系统。假如一个系统由N个子系统组成,只要有一个子系统正常工作,系统就能正常工作,这样的系统称为并联系统,如下图所示。设每个子系统的可靠性分别以R1,R2,…,RN表示,整个系统的可靠性可由下式求得。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
在并联系统中只有一个子系统是真正需要的,其余N-1个子系统称为冗余子系统,随着冗余子系统数量的增加,系统的平均无故障时间也增加了。
|
|
|
|
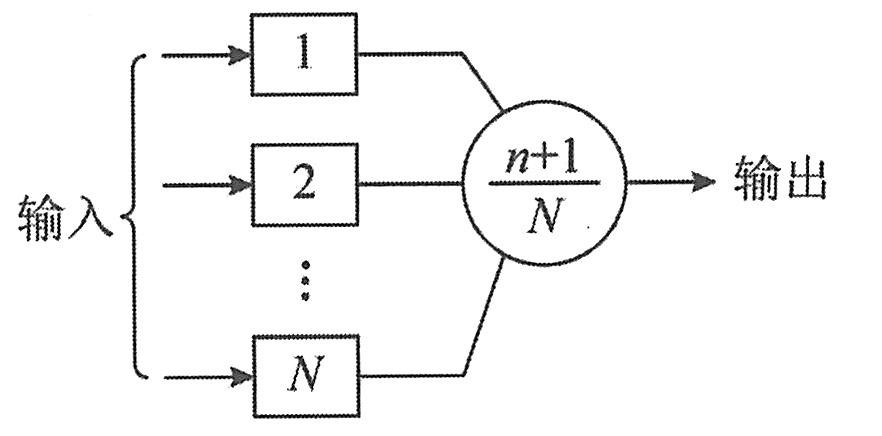
(3)N模冗余系统。N模冗余系统由N个(N=2n+1)相同的子系统和一个表决器组成,表决器把N个子系统中占多数相同结果的输出作为系统的输出,如下图所示。
|
|
|
|
|
|
|
|
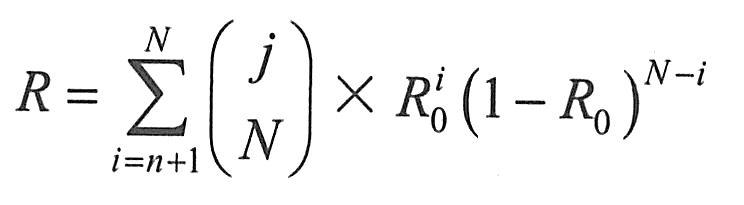
在N个子系统中,只要有n+1个或n+1个以上的子系统能正常工作,系统就能正常工作,输出正确的结果。假设表决器是完全可靠的,每个子系统的可靠性为R0,则N模冗余系统的可靠性为
|
|
|
|
|
其中, 表示从N个元素中取j个元素的组合数。 表示从N个元素中取j个元素的组合数。
|
|
|
|
|
|
(1)提高元器件质量,改进加工工艺与工艺结构,完善电路设计。
|
|
|
|
(2)发展容错技术,使得在计算机硬件有故障的情况下,计算机仍能继续运行,得出正确的结果。
|
|
|